



robotart破解版是国内一款非常优秀的机器人离线编程软件。它是由北京华航唯实机器人科技股份有限公司设计开发,软件内置了云资源库,对机器人的编程系统进行深度的开发,也对工艺规划的仿真系统支持,完成对三维CAD模型的支持,完成深度的自定义,让您对各种内置的功能选择设置,快捷的提高相关的企业运转效率。

软件功能
完全的帮助用户完成对示教编程的代替
可以对机器人停机的时间进行减少
并且使用编程者快速的远离工作环境
完成对各种需要的品牌机器人编程的实现
快捷的完成对程序的优化,也支持对机器人运动学、动力学知识的学习
生成需要的机器人轨迹,并且对碰撞检测模块进行启动
内置的模拟仿真功能,对工作过程中出现的奇异点进行检查
软件特色
调试面板支持用户自定义的完成对各种相关参数的调整
对组/点、指令、线速度、角速度等显示
平移、旋转、坐标表示、调整步长、关节空间的调整
对输出进行快捷的查看,相关的信息了解
编译的功能支持,完成对轨迹的新建,也支持对程序新建
三维球、测量、工件校准、新建坐标系、选项等
管理树、控制面板、显示全部、显示时序图
安装方法
1、下载文件找到"RobotArt_Cpt_x86_Setup_2795.exe"双击运行;
2、进入软件的安装向导界面,点击快速安装;

3、对软件的安装位置选择,默认位置"C:Program Files (x86)CHLRobRobotArtCpt",建议安装D盘,点击立即安装;

4、正在对软件进行快捷的安装,请大家耐心等待就可以完成安装...............

5、安装成功之后,是否立即注册软件,也支持对立即体验点击;

参见问题
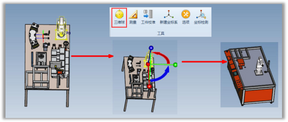
1. 怎样搭建场景,导出工作站?
点击软件左上角的“工作站”,即可自动导入场景。

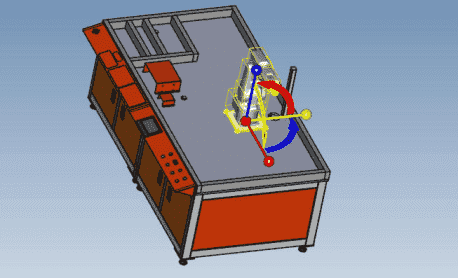
2. 机器人如何移动到台子上?
在涂胶与码垛中,只要保证机器人与工件的相对位置保持一致即可,机器人的位置和实际环境中相近也满足要求。在这里,我们用三维球将机器人移动到工作台上。
调整步骤:
① 选中机器人的底座
② 选择菜单栏中【工具】下的【三维球】后,弹出三维球
③ 用三维球的操作柄将机器人移动到正确位置
* 这里所有工具、物料的位置数据参考机器人的基坐标系。
* 工作台上,机器人和台子边缘之间的距离范围一般在200mm-300mm。
确定范围的参考方法:将机器人底座拖动到台子边缘后,利用三维球的长操作柄向左拖动机器人,输入平移长度。
3. 用三维球移动机构,不能到达目标位置,怎么办?
发生这种情况的原因是目标位置超出了机器人的最大运动范围(不可达),或者不在机器人某个关节的可达范围内(轴超限)。
不可达:缩短机器人和目标位置的距离。
轴超限:优化轨迹,调整轨迹点的位置和姿态。
4. 安装快换工具时成这样了怎么办?
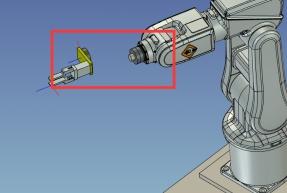
两种办法:
1)右击法兰工具,选择下拉菜单中的【替换工具】,重新安装一次。
2)右击夹爪,选择菜单中的【卸载(无轨迹)】。
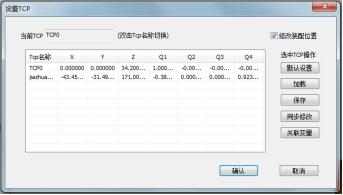
之后右击法兰工具,选择菜单中的【TCP设置】,将当前使用的TCP切换为TCP0.然后安装才能正确。
5. 替换工具后原来的轨迹就不对了,怎么办?
一个个调整轨迹点,但直接重做轨迹的话更快些,所以尽量别在生成了很多轨迹的情况下去替换工具。











 西门子触摸屏编程软件
西门子触摸屏编程软件 Airtest1.2.6 官方版
Airtest1.2.6 官方版 Beautiful Soup下载
Beautiful Soup下载 understand 破解版下载
understand 破解版下载 gcc编译器windows安装
gcc编译器windows安装 JSON Viewer下载
JSON Viewer下载 Structured Storage Viewer下载
Structured Storage Viewer下载 markdownpad2破解版
markdownpad2破解版 Kate下载
Kate下载 IDEA中文版
IDEA中文版